![]()
![]()
The system configuration when using Mitsubishi Electric Point Manager allows for configuring a GOT (Graphic Operation Terminal) device within ICONICS Workbench. See About GOT Point Manager for additional info.
Note: GOT devices can only be edited when disabled. When the device is activated, settings can not be changed until the device is disabled. See Activate and Disable.
To Add GOT
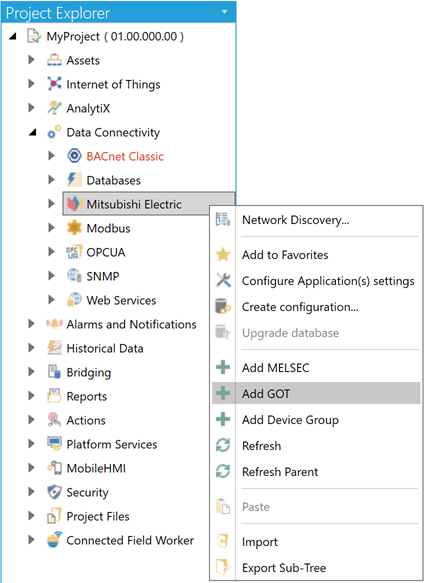
In the Workbench, expand your project in the Project Explorer, and then expand the Data Connectivity node. Right-click the Mitsubishi Electric node and click on Add GOT, as shown below.
Add GOT via the Project Explorer in the Workbench
-OR-
Select the Mitsubishi Electric node in the Project Explorer in the Workbench and then click on the Add GOT button, shown below, in the Edit section of the Home ribbon.
Add GOT Button

This opens the GOT Properties, shown below, in the middle section of the Workbench. Enter a name for the GOT in the Name text entry field.
GOT Properties
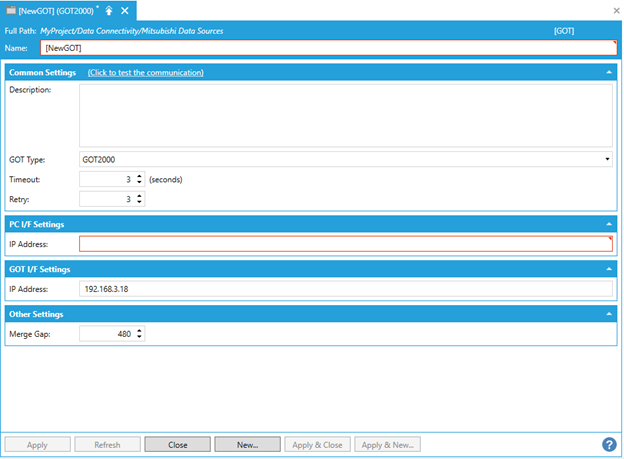
Common Settings
(Click to test the communication) - Click this link to connect to the actual device for testing.
Name - Enter a name for the GOT2000 or GT SoftGOT2000 in the text entry field.
Description - Enter a description for the GOT in the text entry field.
GOT Type - Use the pulldown menu to select between GOT2000 and GT SoftGOT2000.
Timeout - Enter a timeout, in seconds, in the text entry field (or use the up/down arrow buttons) to cease communications attempts upon error.
Retry - Enter a number of communication retries in the text entry field (or use the up/down arrow buttons).
PC I/F Settings
IP Address - Enter the IP address for the PC I/F (interface function) in the text entry field.
GOT I/F Settings
IP Address - Enter the IP address for the GOT I/F (interface function) in the text entry field. Note that this field may be pre-filled.
Other Settings
Merge Gap - Enter a value larger than the number of registers between tags when reading inconsecutive registers in a batch in one communication between Mitsubishi Electric FA Connector and a GOT device. This setting is for adjustment and is usually left at its default value of 400.
Merge Gap Details
Inconsecutive registers can be read in a batch in one communication between Mitsubishi Electric FA Connector and a GOT Device by setting a value larger than the number of registers between tags to be monitored for "Merge gap".
Reading inconsecutive registers in a batch reduces the number of times of communication, which may increase the communication speed.
If the number of registers between tags exceeds a value set for "Merge gap", inconsecutive registers are read in multiple communications.
Example:
When monitoring tags for which inconsecutive registers are set
Registers set for a tag to be monitored: EG20 to EG50, EG60 to EG100, EG200 to EG300
Registers between tags to be monitored: EG51 to EG59 (9 points)
Registers between tags to be monitored: EG101 to EG199 (99 points)
Merge Gap Example
When Setting '9' for "Merge Gap"
EG20 to EG100 can be read in a batch in one communication because the number of registers for ‘b’ does not exceed a value set for "Merge gap". EG60 to EG100 and EG200 to EG300 cannot be read in a batch in one communication because the number of registers for ‘c’ exceeds a value set for "Merge gap". Therefore, EG20 to EG100 are read in a batch in one communication, and EG200 to EG300 in a next communication.
When Setting '100' for "Merge Gap"
EG20 to EG100 can be read in a batch in one communication because the number of registers for ‘b’ does not exceed a value set for "Merge gap". EG60 to EG300 can be read in a batch in one communication because the number of registers for ‘c’ does not exceed a value set for "Merge gap". Therefore, EG20 to EG300 are read in a batch in one communication.
Precautions:
If setting a value larger than the number of registers between tags for "Merge gap" when the number of tags to be monitored is small, the communication speed will be decreased because registers not to be monitored are also read.
Depending on a protocol to be used, the size of registers that can be read in one communication may be small.
In this case, the communication speed is decreased because registers must be read in multiple communications.
Click Apply to save your changes to the configuration and Close to return to the Workbench.
See Also: